I guess I ought to explain what the helicopter controls are doing for the uninitiated.
So to start at the very beginning:
The amount of lift generated by a single blade on a helicopter rotor depends on the angle the blade is tilted at. Helicopter rotors usually turn at a fixed speed, therefore to alter the amount of lift generated the "angle of attack" of a blade is changed. However to further complicate things, in order to make the helicopter go in different directions rather than just up and down, you have to control the angles of individual blades. For example, to go forwards you would generate more lift at the back of the helicopter, making it tilt forwards, and then when it's tilted forwards it flies in that direction.
Collective pitch control is pretty straightforward. There's just a lever, usually at the pilot's left hand that moves a bit like a handbrake. Pull up on the lever and all the blades' angle of attack increases (gets steeper), so the helicopter goes up (collectively - hence the name). Push down on the lever and all the blades' angle of attack decreases (gets flatter) so the helicopter goes down. You can see that lever to the left of the seat in the video of my helicopter in the first post.
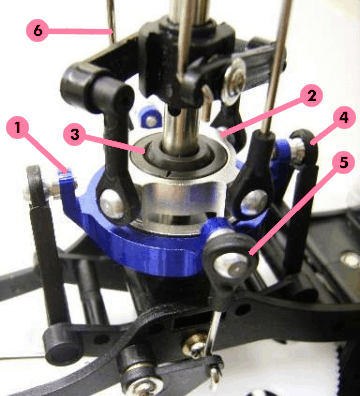
Cyclic pitch control is more complex. It's one thing to tilt a single blade, but remember that these blades are rotating extremely fast, and when you rotate the blade at the back, it's moved to the front a fraction of a second later. There's a thing called a swash plate which has a rotating part and a non-rotating part (see image below - linked to wikipedia swashplate page). The outer (non-rotating) part is directly connected to the joystick and gets tilted in the direction of desired travel. The inner ring sits in it and translates the angle from the non-rotating part to the rotation of the blades. Effectively as the blades pass over a higher angled bit of the swash plate their angle of attack is momentarily changed while they're in that position. Then they return to their original angle when they're not in that position.
 This Eurobricks thread
This Eurobricks thread was my main reference for building this in Lego - I borrowed a good few aspects of the very first image in that post in my design, although it turned out completely different to the naked eye.
There's one final aspect of the controls - the tail rotor controls. A helicopter naturally wants to spin against the spin of its own rotor blades. The tail rotor pushes against that to keep it steady and facing in one direction. But sometimes you want to turn left or right, so there are collective pitch controls on the tail rotor as well to control the amount of force it generates, so instead of just keeping it steady and blocking its natural inclination to spin, it can control whether the helicopter spins a bit, or pushes the helicopter to turn against the natural spin. The pitch of the tail rotors is controlled by pedals - push down the right pedal and the helicopter turns left (if I remember correctly) and vice versa.
There are some nice animated gifs that might explain the pitch control mechanisms on
this page.

 Topic: Technic helicopter (Read 18526 times)
Topic: Technic helicopter (Read 18526 times)